Video
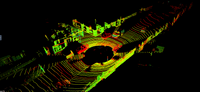
Für die Untersuchung der Punktwolke wurde ein Programm mittels C++ geschrieben. Zum Laden und Untersuchen der Messpunkte wurde die Bibliothek "Point Cloud Libary" genutzt. Die Messpunkte beinhalten Werte zur Lokalisierung im dreidimensionalen Raum (X,Y,Z), sowie einen Wert, der die Intensität des reflektierten Signals beschreibt.
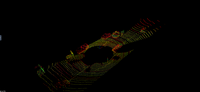
Nach dem Laden der Messpunkte wurde die Punktwolke gefiltert. Dies war sinnvoll, da die Dichte die Laufzeit stark einschränkte und - vor allem in Fahrzeugnähe - nicht so hochauflösend benötigt wurde. Hierbei wurden zunächst Messpunkte entfernt, die seitlich des Fahrzeugs und außerhalb der Straßenbreite lagen, wie zum Beispiel Hauswände. Anschließend wurde eine Voxel Grid Filterung implementiert. Hierbei wird ein dreidimensionales Gitternetz über die Punktwolke gelegt und es wird nur ein Messpunkt aus jedem Voxel übernommen.
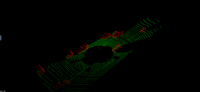
Zum Unterteilen der einzelnen Verkehrsteilnehmer in der Objektpunktwolke wurde ein euklidischer Clusteralgorithmus angewendet. Hierbei wurde jeder Punkt in der Punktwolke in einer Schleife eingearbeitet. Wurde ein Punkt nicht vorher betrachtet, musste ein neues Cluster erstellt und eine Funktion zum Berechnen der Nähe anderer Punkte aufgerufen werden, wofür ein KD-Tree genutzt wurde. In einer weiteren Schleife wurde durch diese nahen Punkte iteriert, und die Funktion wurde rekursiv aufgerufen. Als Ergebnis erhielt man für jedes Fahrzeug auf der Straße ein neues Cluster.

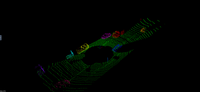
Zuletzt werden Bounding Boxen um die gefundenen Objekte gezogen. Diese repräsentieren den Bereich, bei dem es zu einer Kollision kommen kann.