Video
Beschreibung
Der erste Schritt zur Lokalisierung des Fahrzeuges ist die Initialisierung, bei der auch eine Abschätzung der GPS Positionen der Landmarken und Sensorrauschen einfließen. Zu Beginn werden alle Landmarken gleich gewichtet. Darauf aufbauend werden Fahrzeuggeschwindigkeit und Gierrate verwendet, um eine Prädiktion der X und Y Position sowie der Gierrate zu tätigen. Im nächsten Schritt werden Daten der Sensorfusion und Positionen von Landmarken verwendet, um die Gewichte zu aktualisieren. Darauf folgt die erneute Prädiktion mit aktualisierten Gewichten.
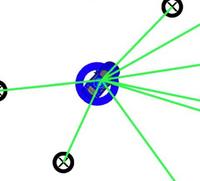
Im Ergebnisvideo ist die wahre Fahrzeugposition durch ein blaues Fahrzeug dargestellt. Die grünen Linien symbolisieren die Messungen der Landmarken. Der blaue Kreis zeigt die Ergebnisse der Lokalisierung mit dem Partikelfilter an. Idealerweise sollte dieser Kreis genau unter dem Fahrzeug sein und der schwarze Pfeil in die Fahrtrichtung zeigen.