Video
Beschreibung

Die erstellte Trajektorie besteht aus 50 zukünftigen Wegpunkten, die das Fahrzeug durchfahren soll. Das simulierte Fahrzeug durchfährt dabei alle 20ms einen Wegpunkt - je weiter die Wegpunkte auseinander liegen, desto schneller fährt das Fahrzeug. Bei einer geraden Strecke liegen diese Punkte 0,5 Meter auseinander, wobei das Fahrzeug dann mit einer Geschwindigkeit von 25m/s fährt. Damit die Trajektorie nach einem Zeitschritt (20ms) nicht komplett neu berechnet werden muss, werden manche Wegpunkte der vergangenen Trajektorie übernommen, um so auch einen sanfteren Übergang gewährleisten zu können. Die fehlenden Wegpunkte werden durch Daten der Sensorfusion berechnet.
Die simulierte Umwelt besteht aus einer Schnellstraße mit einer Länge von ca. 7km. Zur Berechnung der Wegpunkte liegt eine Karte mit 181 Wegpunkten vor (auf der gelben mittleren Linie liegend). Fehlende Wegpunkte werden interpoliert. Um die Trajektorien nicht für das globale Koordinatensystem berechnen zu müssen, werden frenetische Koordinaten berechnet.

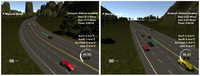
Zur Berücksichtigung anderer Verkehrsteilnehmer liegen aus der Sensorfusion für jedes andere Fahrzeug die ID, die Position in x und y, die frenetischen Koordinaten s und d sowie die Geschwindigkeiten vx und vy vor. Mit diesen Werten können Überholmanöver geplant werden, sofern ein Fahrzeug mit einer langsameren Geschwindigkeit vorausfährt. Hierfür muss außerdem überprüft werden, ob links oder rechts eine Lücke ist, die groß genug zum Einscheren ist. Sollte dies nicht der Fall sein, bremst das Egofahrzeug und wartet, bis sich eine geeignete Lücke ergibt und der Überholvorgang gestartet werden kann. Bei allen Manövern darf eine maximale Beschleunigung nicht überschritten werden und das Fahrzeug muss die Strecke kollisionsfrei fahren können.